
提供:@Press
安藤ハザマ(本社:東京都港区、代表取締役社長:国谷 一彦)は、ダム堤体コンクリート打設機械の「遠隔化」・「自動化」に向けた取り組みを行っています。
今回、その取り組みの一環として、ダム用油圧ショベル型バイブレータ(以下、バイバック)(注1)の遠隔操作と自動運転を実現するシステム「RABV(ラ・ビブ、Remote Automated Backhoe with Vibrator)」を開発し、実証実験を行いました(写真1)。

写真1:RABV搭載バイバック
1. 開発の背景
建設業では、熟練技能者の高齢化及び就業人口の減少等の課題を抱えており、特にダム工事では、立地が僻地であること、特殊な技能を要することから、「省力化」「省人化」が求められています。
本開発では、ダムの堤体コンクリート打設作業において、特に作業の熟練度が必要なバイバックの「遠隔化」「自動化」により、締固め作業の「省人化」「省力化」を目指しています。
2. 本システムの特長
「RABV」は、(1)遠隔操作プログラム (2)自動走行プログラム (3)自動締固めプログラムの3つで構成されます。オペレータが「RABV」を搭載した専用の端末を用いることで、「バイバックの遠隔・自動操作」を可能とします。
(1) 遠隔操作プログラム
今回開発したバイブレータの旋回や振動の開始・停止を遠隔で操作できるプログラムを、汎用のバックホウ遠隔操作装置と組み合わせることで、バイバック全体の遠隔化を実現しました。これにより専用端末を用いて遠隔操作を行うことが可能です(写真2)。
(2) 自動走行プログラム
堤体コンクリートの打設順序を示すレーンスケジュールをプログラム上で再現し、打設か所を選択することで、バイバックを自動走行させる機能を備えています(図1)。
(3) 自動締固めプログラム
打設か所に対して、バイブレータの差し込み位置・順序を設定し、バイバックの位置と姿勢を自動で認識することで、計画通り締固めを行うことができます。また、バイバック本体に取り付けたライダーLiDAR(注2)により、打設か所内のコンクリート形状を認識し、バイブレータの差し込み位置・順序の修正やコンクリート表面の高さに応じた引き抜き判断を自動で行います(図1)。

写真2:バイバックの遠隔操作状況
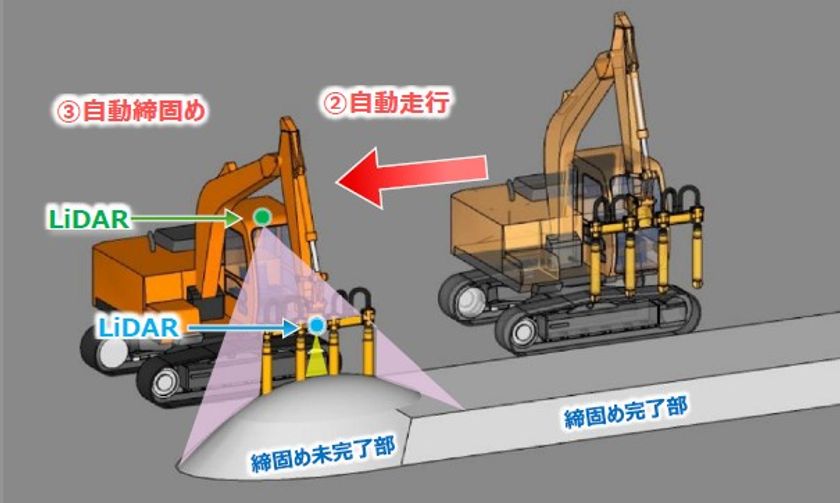
図1:自動走行・自動締固めイメージ
3. 実証実験の概要と成果
「RABV」の機能と精度の確認を目的に、ダムコンクリートの模擬材を用いた実証実験を行ったところ、各機能が有効に働き、適切なコンクリートの締固めが実施できることを確認しました。
4. 今後の展開
今後は、さらなる実証実験や「自動施工における安全ルール」(注3)への適合を図ることで、製品としての信頼性を高め、最終的には当社のダム施工現場への適用を予定しています。
安藤ハザマは、引き続き、ダムの堤体コンクリート打設機械の「遠隔化」「自動化」を目指した取り組みを推進していきます。
(注1)エクセン株式会社登録商標
(注2)LiDAR
レーザー光を使ったリモートセンシングによって物体検知や対象物までの距離を計測する技術。
(注3)自動施工における安全ルール
令和7年3月 国土交通省 大臣官房 参事官(イノベーション)グループ
https://www.mlit.go.jp/tec/constplan/content/001885762.pdf
※この記事は、プレスリリース配信サービス「@Press」より提供を受けて掲載しています。 記事の内容や関連画像、および発表されたサービス・商品に関するお問い合わせは、発表元である企業・団体様へ直接ご連絡ください。 なお、掲載情報は発表当時のものとなりますので最新の情報とは異なる場合がありますのでご了承ください。